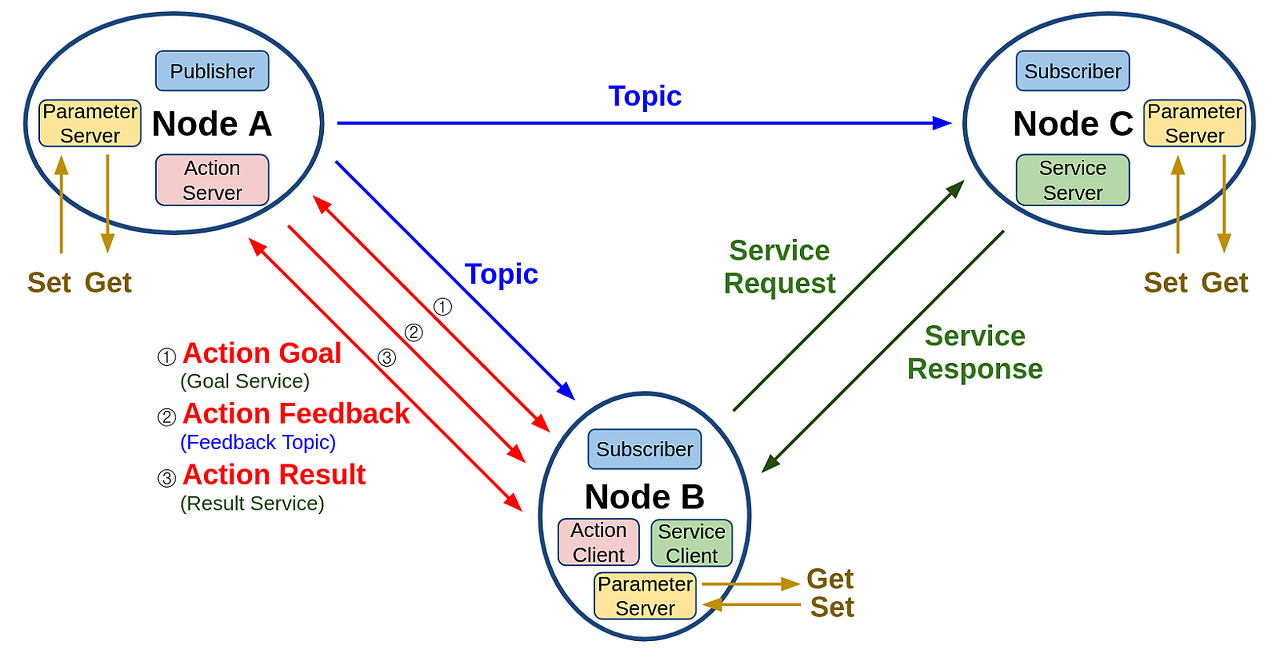
지난 포스팅에서 Package와 Node에 관해 정리했다.요약하면, Package는 Node들의 집합과 이를 실행하는 launch file로 된 것이고, Node는 우리가 RCL(ROS Client Library)를 활용하여 만드는 Process이다. Node(Process) 간의 통신 방식은 3가지이다. Topic, Service, Action 관계는 아래 그림과 같다.Node InterfaceNode 간 데이터를 주고받는 형식이다. Interface에는 IDS(Interface Definition Language)와 msg, srv, action이 있다. msg는 Topic에서 주고받는 데이터, srv는 service에서 주고받는 데이터, action은 action에서 주고받는 데이터이다. 이 데이터..