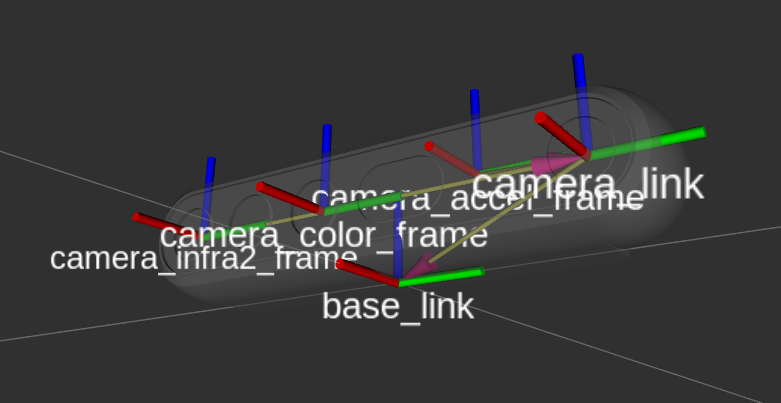
1. 공간적 표준 (좌표, SI 단위)ROS2는 SI단위를 사용한다. meter, second, volt...1.1 좌표계정말 중요한 개념이다. 원본은 책과 rep-103을 참고하자.오른손(외적) 법칙을 사용한다.컴퓨터 비전 분야에서는 Z forward, X right, Y down 좌표계를 사용한다. (깊이를 계산할 때 Z를 앞으로 둬야 편하게 계산 가능하기 때문이다. image plane을 x y로 두면 편하다.)로봇 분야에선 X forward, Y left, Z up 좌표계를 사용한다.IMU를 살 때 NED(x North, y East, z Down)인지 ENU(x East, y North, z Up)인지 잘 확인해야 한다.RGB를 순서대로 Red:X, Green:Y, Blue:Z이다.지리적 위치 ..