지난 포스팅에서 Package와 Node에 관해 정리했다.
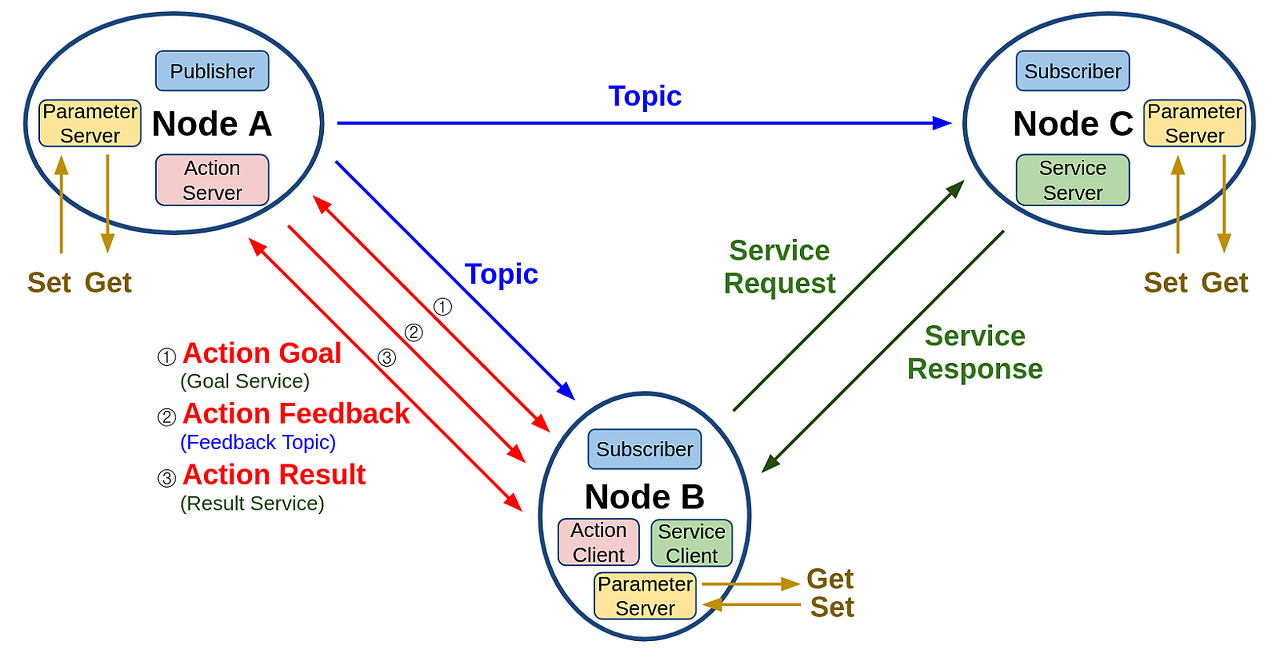
요약하면, Package는 Node들의 집합과 이를 실행하는 launch file로 된 것이고, Node는 우리가 RCL(ROS Client Library)를 활용하여 만드는 Process이다. Node(Process) 간의 통신 방식은 3가지이다. Topic, Service, Action 관계는 아래 그림과 같다.
Node Interface
Node 간 데이터를 주고받는 형식이다. Interface에는 IDS(Interface Definition Language)와 msg, srv, action이 있다. msg는 Topic에서 주고받는 데이터, srv는 service에서 주고받는 데이터, action은 action에서 주고받는 데이터이다. 이 데이터들은 Interface file에 저장돼 있다. 아래 파일은 그 예시이다.
//filename.msg || filename.srv || filename.action
field_type1 field_name1
field_type2 field_name2
field_type3 field_name3
--- // 서비스와 action은 아래 bar로 feedback 과 response에 관한 interface도 정의해야 한다. Node Parameter
Parameter는 Node안에 있는 Parameter Server이다. 전역변수로 해당 노드의 필요한 정보를 Get 하고 Set 할 수 있다. 따로 컴파일하지 않고 고칠 수 있는 부분이다.
//example
ros2 param list
ros2 param describe <>node를 실행할 때 3가지 방식으로 parameter를 줄 수 있다. 대체하거나, 세팅하거나, 파일로 줄 수 있다.
// remapped using the syntax -r <old name>:=<new name>.
// --ros-args -p param_name:=param_value //setting
// --ros-args --params-file demo_params.yaml // from file =>
ros2 param dump /turtlesim // turtlesim noded안의 parameter setting을 다운 받음Namespace vs ROS_DOMAIN_ID
Parameter는 Node안에 있는 Parameter Server이다. 전역변수로 해당 노드의 필요한 정보를 Get 하고 Set 할 수 있다. 따로 컴파일하지 않고 고칠 수 있는 부분이다. 같은 네트워크를 공유할 경우 namespace는 다른 rqt에서도 보인다. 그러나 DOMAIN ID를 나누면, 다른 default domain id에선 안 보인다.
// Domain ID
export ROS_DOMAIN_ID=11 //0~101
// Namespace
ros2 run turtlesim turtlesim_node --ros-arg -r __ns:=/namespace1
ps.
- rosout이라는 topic에 의해 Node의 log를 볼 수 있다. DEBUG, INFO, WARN, ERROR, FATAL
ref.
- ROS2로 시작하는 로봇 프로그래밍
- https://docs.ros.org/en/foxy/How-To-Guides/Node-arguments.html
'Engineering > ROS' 카테고리의 다른 글
| ROS2 표준 시간, 좌표계 (0) | 2025.01.12 |
|---|---|
| ROS2 참고 사이트 (0) | 2025.01.10 |
| ROS2 빌드, 파일 시스템 (0) | 2025.01.08 |
| Docker로 ROS를 사용하면 안 되는 이유 (0) | 2025.01.06 |
| ROS2, DDS와 QoS (0) | 2025.01.04 |